發布時間:2025-06-14
圖1:中國首例無線侵入式腦機接口系統前瞻性臨床試驗術后項目團隊合影留念
近日,中國科學院腦科學與智能技術卓越創新中心(趙鄭拓研究組及李雪研究組)聯合復旦大學附屬華山醫院(吳勁松/路俊鋒團隊),與相關企業合作,成功開展了中國首例侵入式腦機接口的前瞻性臨床試驗。該成果標志著我國在侵入式腦機接口技術上成為繼美國之后,全球第二個進入臨床試驗階段的國家,也是上海市腦機接口臨床試驗與轉化重點實驗室依托兩家單位成立后的首項重要成果。
?????受試者是一位因高壓電事故導致四肢截肢的男性。自2025年3月植入該腦機接口設備以來,系統運行穩定,術后至今一個多月未出現感染和電極失效的情況。僅用2-3周的訓練,他便實現了下象棋、玩賽車游戲等功能,達到了跟普通人控制電腦觸摸板相近的水平。該系統在未來獲批注冊上市后,有望顯著改善完全性脊髓損傷、雙上肢截肢及肌萎縮側索硬化癥患者等群體的生存質量。
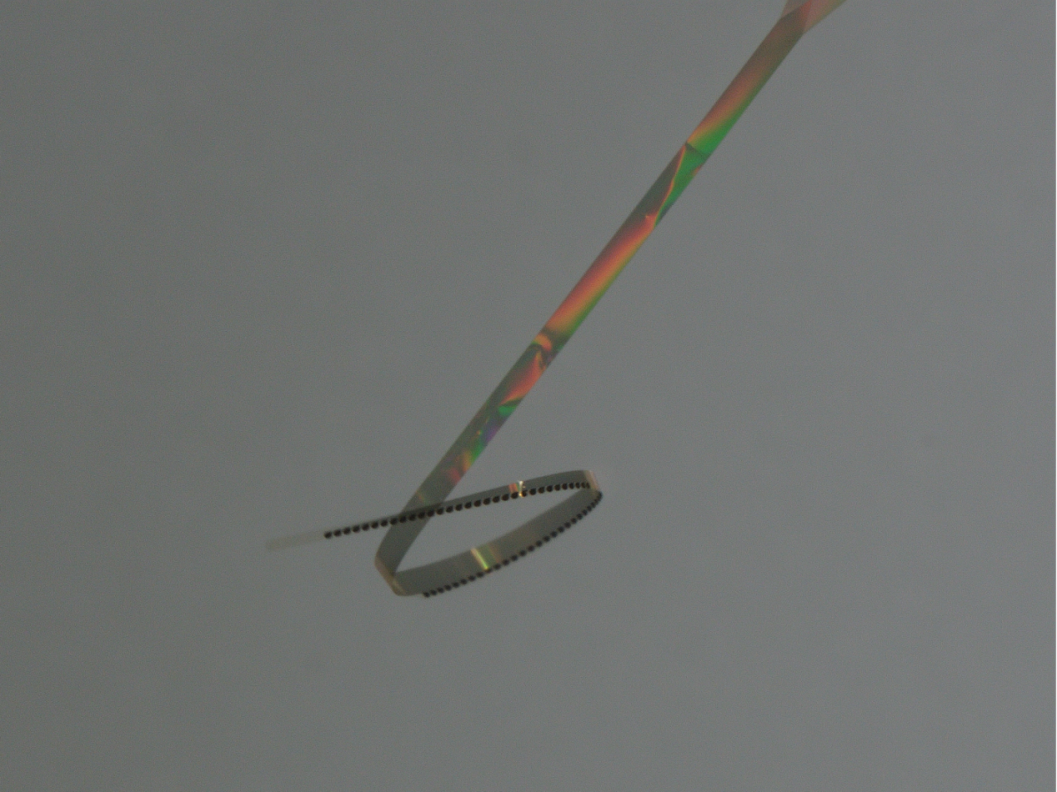
圖3:超柔性電極尺寸極小,僅約頭發絲的1/100
與當前世界上唯一進入臨床試驗階段的,代表業界最高水平的伊隆·馬斯克創辦企業Neuralink侵入式腦機接口系統中使用的神經電極相比,腦智卓越中心在神經界面技術上處于領先地位。
趙鄭拓團隊研制及生產的神經電極是目前全球尺寸最小、柔性最強的神經電極,截面積僅為Neuralink所使用電極的1/5到1/7,柔性超過Neuralink百倍,讓腦細胞幾乎‘意識’不到旁邊有異物,最大程度上降低了對腦組織的損傷。該超柔性神經電極具備高密度、大范圍、高通量、長時間的穩定在體神經信號采集能力,已相繼完成在嚙齒類、非人靈長類和人腦中長期植入和穩定記錄驗證,為解決植入式腦機接口前端電極組織相容性差和信道帶寬窄的關鍵瓶頸問題提供了開拓性的方案。
兼具單神經元信號采集能力與低組織損傷特性的侵入式腦機接口系統

圖4:植入體直徑26mm、厚度不到6mm,是全球最小尺寸的腦控植入體,僅硬幣大小
趙鄭拓和李雪團隊的侵入式腦機接口系統是國內唯一獲得了注冊型檢報告且可以長期穩定采集到單神經元Spike信號的腦機接口系統,其毫秒級、單神經元水平的神經信號捕獲特性為應用提供了良好的神經電信號數據基礎。在手術友好程度方面,腦智卓越中心研制的植入體直徑26mm、厚度不到6mm,是全球最小尺寸的腦控植入體,僅硬幣大小,為Neuralink產品1/2。因此不需要整體貫穿顱骨,只需要在大腦運動皮層上方的顱骨上“打薄”出一塊硬幣大小的凹槽用以鑲嵌設備,再在凹槽中打一個5毫米的穿刺孔。采用神經外科微創術式,在有效降低手術期風險的同時,顯著縮短術后康復周期。基于成熟外科技術構建的完整操作體系,其標準化的操作流程更利于在各級醫療機構神經外科開展規模化應用。
此外,有別于Neuralink較多的冗余設計,該侵入式腦機接口系統是在神經科學原理指導下設計的,可以通過較少數量的植入電極實現跟Neuralink相似的控制水平。該低冗余量設計盡量減少對患者帶來植入損傷,讓患者收益風險比最高。
高魯棒性、低延時、可自動適應的實時在線解碼算法
實時在線解碼是腦機接口技術的關鍵環節。該系統需在十幾毫秒窗口期內完成神經信號的特征提取、運動意圖解析及控制指令生成全流程。其核心挑戰是建立毫秒級高精度響應的閉環控制鏈路,適應神經信號的非平穩性,并實現解碼器與被試的雙向動態適應,這對解碼模型的動態適應性和計算效率提出了雙重考驗。
趙鄭拓研究組通過自主研發的在線學習框架,創造性實現了神經解碼器的動態優化。該解碼框架采用參數自適應調節機制,協調解碼器優化和神經可塑性,突破傳統靜態解碼模型難以適應神經信號時變特性的局限性。結合柔性電極信號采集穩定性優勢和高精度神經發放估計策略,實現了低延遲,高魯棒性,跨天穩定的實時在線運動解碼。
依托腦智卓越中心國際領先的非人靈長類研究平臺,在開展人體試驗之前,該系統的安全性和功能性已經在獼猴中得到了驗證。侵入式腦機接口系統被植入到獼猴運動皮層的手部和手臂功能區,植入手術順利完成后系統持續運行穩定,未出現感染和電極失效的情況。獼猴經過訓練,已成功實現了僅憑神經活動即可敏捷且精準的控制計算機光標運動,并在此基礎上實現目標引導下的腦控打字。
在平穩運行一段時間后,獼猴的植入體被手術安全取出,并更換新植入體在同一個顱骨開孔位置完成二次植入。術后系統持續運行穩定,同樣未出現感染和電極失效的情況,獼猴快速適用新系統并流暢實現腦控光標。該手術的順利完成驗證了植入體通過二次手術升級換代的可行性。
精準定位與植入,靶向大腦運動控制中心

中國首例無線侵入式腦機接口系統前瞻性臨床試驗手術現場,華山醫院吳勁松教授與路俊鋒教授做討論
精準定位和植入是整個手術成功的關鍵。高精度的電極植入可以為后續的信號采集和解碼奠定重要基礎。在為受試者進行手術前,華山醫院路俊鋒教授團隊采用了功能磁共振成像聯合CT影像技術,重構了受試者專屬三維模型與人腦運動皮層的詳細功能地圖以確保植入位置的精確性。手術當天,路俊鋒教授團隊借助高精度導航系統,在喚醒手術下將超柔性電極植入受試者大腦的運動皮層指定區域,整個手術過程精確到毫米級別,最大限度地保證了安全性和有效性。

圖5:受試者未來生活展望
下一步項目團隊會嘗試讓受試者使用機械臂,使得他可以在物理生活中完成抓握、拿杯子等操作。后續還將涉及到對復雜物理外設進行控制,例如對機器狗、具身智能機器人等智能代理設備的控制,從而拓展他的生活邊界。
以上工作獲得上海市級科技重大專項“腦機接口關鍵技術與核心器件”、上海市科委戰略前沿腦機接口專項項目,以及復旦附屬華山醫院、上海市腦機接口臨床試驗與轉化重點實驗室等機構的支持。
 附件下載:
附件下載: 